IMU pre filter struct. More...
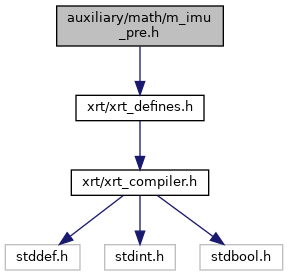
#include "xrt/xrt_defines.h"
Include dependency graph for m_imu_pre.h:
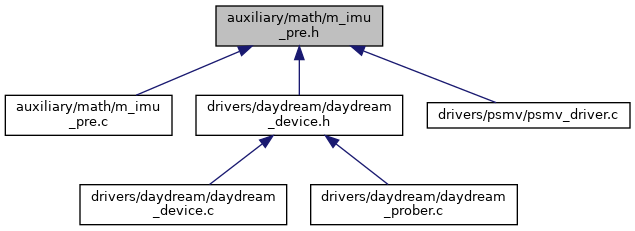
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| struct | m_imu_pre_filter_part |
| This is a common IMU pre-filter which takes raw 'ticks' from a 3 axis IMU measurement and converts it into degrees per secs and meters per floats. More... | |
| struct | m_imu_pre_filter |
| This is a common IMU pre-filter which takes raw 'ticks' from an IMU measurement and converts it into floats representing radians per second and meters per second^2 floats. More... | |
Functions | |
| void | m_imu_pre_filter_init (struct m_imu_pre_filter *imu, float ticks_to_float_accel, float ticks_to_float_gyro) |
| A simple init function that just takes the two ticks_to_float values, all other values are set to identity. More... | |
| void | m_imu_pre_filter_set_switch_x_and_y (struct m_imu_pre_filter *imu) |
| Sets the transformation to flip X and Y axis. More... | |
| void | m_imu_pre_filter_data (struct m_imu_pre_filter *imu, const struct xrt_vec3_i32 *accel, const struct xrt_vec3_i32 *gyro, struct xrt_vec3 *out_accel, struct xrt_vec3 *out_gyro) |
| Pre-filters the values, taking them from ticks into float values. More... | |
Detailed Description
IMU pre filter struct.
Function Documentation
◆ m_imu_pre_filter_data()
| void m_imu_pre_filter_data | ( | struct m_imu_pre_filter * | imu, |
| const struct xrt_vec3_i32 * | accel, | ||
| const struct xrt_vec3_i32 * | gyro, | ||
| struct xrt_vec3 * | out_accel, | ||
| struct xrt_vec3 * | out_gyro | ||
| ) |
Pre-filters the values, taking them from ticks into float values.
See description of m_imu_pre_filter_part for formula used. Also rotates values with the imu_to_head pose.
◆ m_imu_pre_filter_init()
| void m_imu_pre_filter_init | ( | struct m_imu_pre_filter * | imu, |
| float | ticks_to_float_accel, | ||
| float | ticks_to_float_gyro | ||
| ) |
A simple init function that just takes the two ticks_to_float values, all other values are set to identity.
◆ m_imu_pre_filter_set_switch_x_and_y()
| void m_imu_pre_filter_set_switch_x_and_y | ( | struct m_imu_pre_filter * | imu | ) |
Sets the transformation to flip X and Y axis.
This changes the handedness of the coordinates.
