Handling of files and calibration data. More...
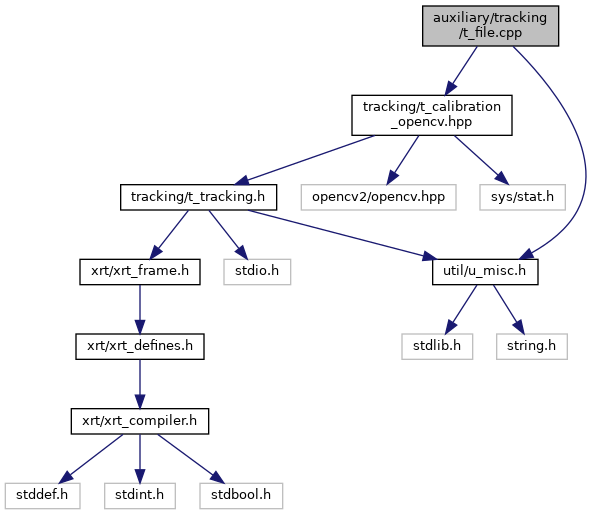
Include dependency graph for t_file.cpp:
Functions | |
| RemapPair | calibration_get_undistort_map (t_camera_calibration &calib, cv::InputArray rectify_transform_optional, cv::Mat new_camera_matrix_optional) |
| Prepare undistortion/normalization remap structures for a rectilinear or fisheye image. More... | |
| bool | t_stereo_camera_calibration_load_v1 (FILE *calib_file, struct t_stereo_camera_calibration **out_data) |
| Load stereo calibration data from a given file. More... | |
| bool | t_file_save_raw_data (FILE *calib_file, struct t_stereo_camera_calibration *data) |
| bool | t_stereo_camera_calibration_load_v1_hack (struct t_stereo_camera_calibration **out_data) |
| Load a stereo calibration struct from a hardcoded place. More... | |
| bool | t_file_save_raw_data_hack (struct t_stereo_camera_calibration *data) |
| Save raw calibration data to file, hack until prober has storage for such things. More... | |
Detailed Description
Handling of files and calibration data.
Function Documentation
◆ calibration_get_undistort_map()
| RemapPair calibration_get_undistort_map | ( | t_camera_calibration & | calib, |
| cv::InputArray | rectify_transform_optional = cv::noArray(), |
||
| cv::Mat | new_camera_matrix_optional = cv::Mat() |
||
| ) |
Prepare undistortion/normalization remap structures for a rectilinear or fisheye image.
- Parameters
-
calib A single camera calibration structure. rectify_transform_optional A rectification transform to apply, if desired. new_camera_matrix_optional Unlike OpenCV, the default/empty matrix here uses the input camera matrix as your output camera matrix.
- Todo:
- Scale Our intrinsics if the frame size we request
References t_camera_calibration::image_size_pixels, and t_camera_calibration::use_fisheye.
Referenced by StereoRectificationMaps::StereoRectificationMaps().
◆ t_file_save_raw_data_hack()
| bool t_file_save_raw_data_hack | ( | struct t_stereo_camera_calibration * | data | ) |
Save raw calibration data to file, hack until prober has storage for such things.
◆ t_stereo_camera_calibration_load_v1()
| bool t_stereo_camera_calibration_load_v1 | ( | FILE * | calib_file, |
| struct t_stereo_camera_calibration ** | out_data | ||
| ) |
Load stereo calibration data from a given file.
References t_stereo_camera_calibration_alloc().
Referenced by t_stereo_camera_calibration_load_v1_hack().
◆ t_stereo_camera_calibration_load_v1_hack()
| bool t_stereo_camera_calibration_load_v1_hack | ( | struct t_stereo_camera_calibration ** | out_data | ) |
Load a stereo calibration struct from a hardcoded place.
- Todo:
- 256 maybe not enough
- Todo:
- Use multiple env vars?
- Todo:
- Hardcoded 256
References t_stereo_camera_calibration_load_v1().
