IMU fusion implementation - for inclusion into the single kalman-incuding translation unit. More...
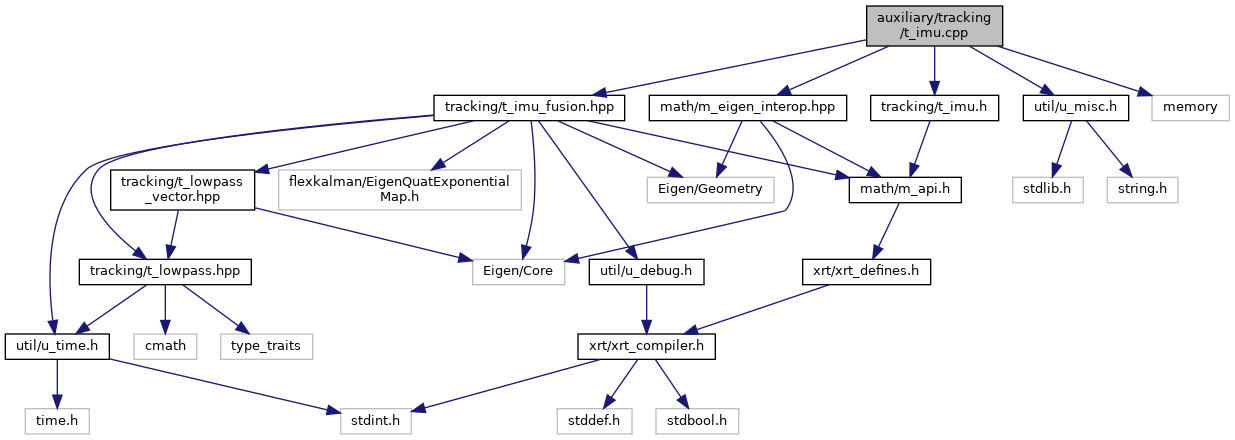
#include "tracking/t_imu.h"#include "tracking/t_imu_fusion.hpp"#include "math/m_eigen_interop.hpp"#include "util/u_misc.h"#include <memory>
Include dependency graph for t_imu.cpp:
Data Structures | |
| struct | imu_fusion |
Functions | |
| struct imu_fusion * | imu_fusion_create () |
| void | imu_fusion_destroy (struct imu_fusion *fusion) |
| int | imu_fusion_incorporate_gyros (struct imu_fusion *fusion, uint64_t timestamp_ns, struct xrt_vec3 const *ang_vel, struct xrt_vec3 const *ang_vel_variance) |
| int | imu_fusion_incorporate_accelerometer (struct imu_fusion *fusion, uint64_t timestamp_ns, struct xrt_vec3 const *accel, struct xrt_vec3 const *accel_variance, struct xrt_vec3 *out_world_accel) |
| int | imu_fusion_get_prediction (struct imu_fusion const *fusion, uint64_t timestamp_ns, struct xrt_quat *out_quat, struct xrt_vec3 *out_ang_vel) |
| int | imu_fusion_get_prediction_rotation_vec (struct imu_fusion const *fusion, uint64_t timestamp_ns, struct xrt_vec3 *out_rotation_vec) |
| int | imu_fusion_incorporate_gyros_and_accelerometer (struct imu_fusion *fusion, uint64_t timestamp_ns, struct xrt_vec3 const *ang_vel, struct xrt_vec3 const *ang_vel_variance, struct xrt_vec3 const *accel, struct xrt_vec3 const *accel_variance, struct xrt_vec3 *out_world_accel) |
Detailed Description
IMU fusion implementation - for inclusion into the single kalman-incuding translation unit.
