A IMU fusion specially made for 3dof devices. More...
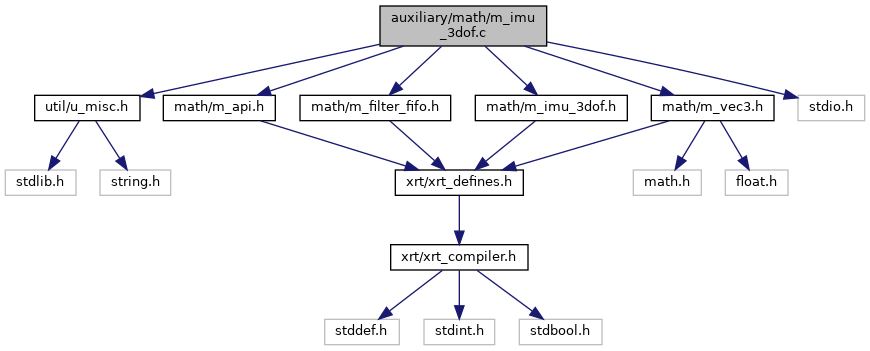
#include "util/u_misc.h"#include "math/m_api.h"#include "math/m_filter_fifo.h"#include "math/m_imu_3dof.h"#include "math/m_vec3.h"#include <stdio.h>
Include dependency graph for m_imu_3dof.c:
Macros | |
| #define | DUR_1S_IN_NS (1000 * 1000 * 1000) |
| #define | DUR_300MS_IN_NS (300 * 1000 * 1000) |
| #define | DUR_20MS_IN_NS (20 * 1000 * 1000) |
Functions | |
| void | m_imu_3dof_init (struct m_imu_3dof *f, int flags) |
| void | m_imu_3dof_close (struct m_imu_3dof *f) |
| void | m_imu_3dof_update (struct m_imu_3dof *f, uint64_t timepoint_ns, const struct xrt_vec3 *accel, const struct xrt_vec3 *gyro) |
Detailed Description
A IMU fusion specially made for 3dof devices.
Function Documentation
◆ m_imu_3dof_update()
| void m_imu_3dof_update | ( | struct m_imu_3dof * | f, |
| uint64_t | timepoint_ns, | ||
| const struct xrt_vec3 * | accel, | ||
| const struct xrt_vec3 * | gyro | ||
| ) |
Skip the first sample.
