A single PlayStation Move Controller. More...
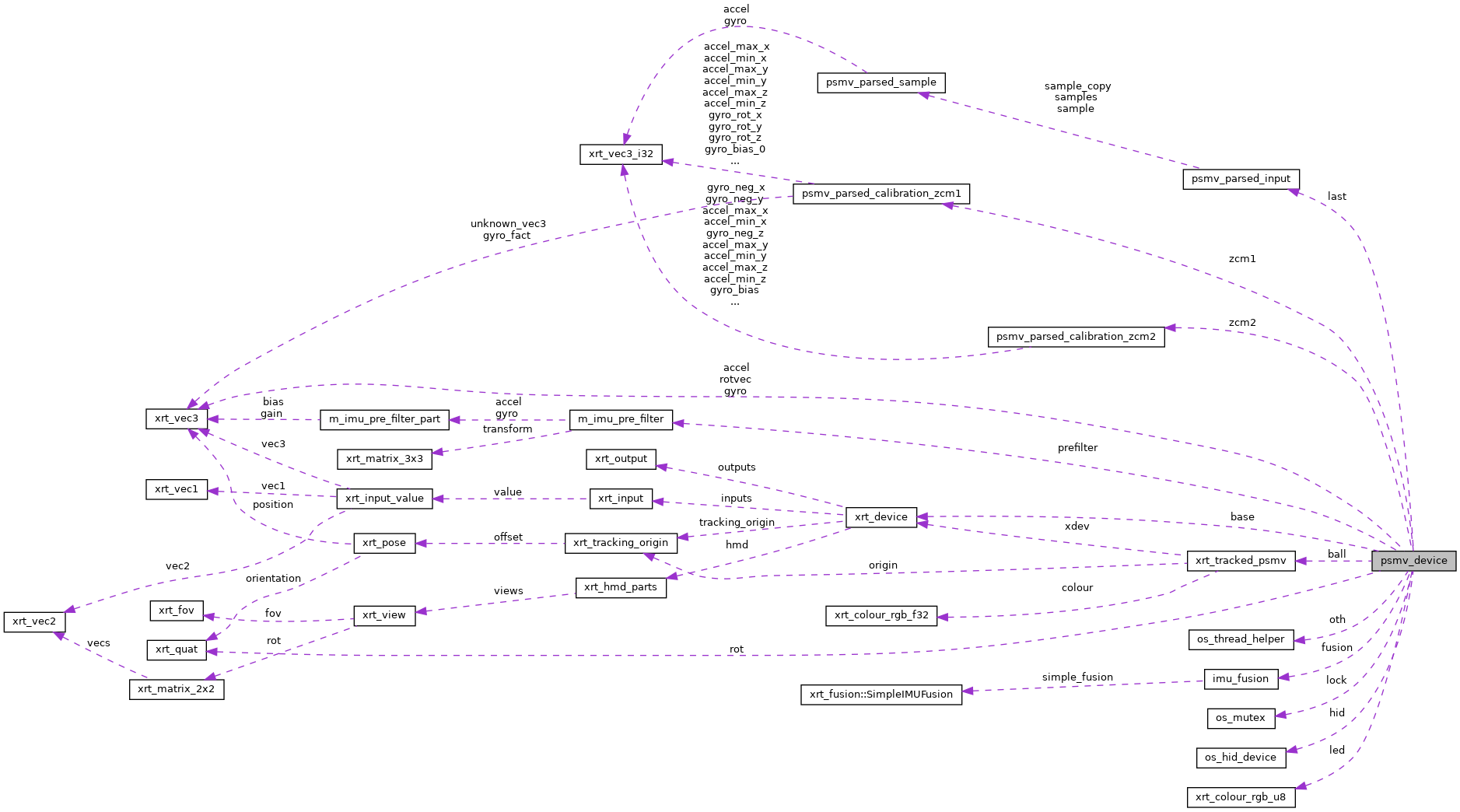
Collaboration diagram for psmv_device:
Data Fields | |
| struct xrt_device | base |
| struct os_hid_device * | hid |
| struct xrt_tracked_psmv * | ball |
| struct os_thread_helper | oth |
| struct { | |
| int64_t resend_time | |
| struct xrt_colour_rgb_u8 led | |
| uint8_t rumble | |
| } | wants |
| What should be set. More... | |
| struct { | |
| struct xrt_colour_rgb_u8 led | |
| uint8_t rumble | |
| } | state |
| What is currently set on the device. More... | |
| struct { | |
| union { | |
| struct psmv_parsed_calibration_zcm1 zcm1 | |
| struct psmv_parsed_calibration_zcm2 zcm2 | |
| } | |
| struct m_imu_pre_filter prefilter | |
| } | calibration |
| struct { | |
| struct os_mutex lock | |
| Lock for last and fusion. More... | |
| struct psmv_parsed_input last | |
| Last sensor read. More... | |
| struct { | |
| struct xrt_quat rot | |
| struct xrt_vec3 rotvec | |
| struct imu_fusion * fusion | |
| struct { | |
| struct xrt_vec3 accel | |
| struct xrt_vec3 gyro | |
| } variance | |
| } fusion | |
| }; | |
| struct { | |
| struct xrt_vec3 accel | |
| Last adjusted accelerator value. More... | |
| struct xrt_vec3 gyro | |
| Last adjusted gyro value. More... | |
| } | read |
| uint16_t | pid |
| bool | print_spew |
| bool | print_debug |
| struct { | |
| bool control | |
| bool calibration | |
| bool last_frame | |
| bool fusion | |
| } | gui |
Detailed Description
A single PlayStation Move Controller.
A note about coordinate system. If you stand the controller in front of you so that the ball is pointing upward, buttons towards you. Then think of the ball as a head that is looking away from you. The buttons then are is it's back, the trigger the front.
Translated to axis that means the ball is on the Y+ axis, the buttons on the Z+ axis, the trigger on the Z- axis, the USB port on the Y- axis, the start button on the X+ axis, select button on the X- axis.
Field Documentation
◆ accel
| struct xrt_vec3 psmv_device::accel |
Last adjusted accelerator value.
◆ gyro
| struct xrt_vec3 psmv_device::gyro |
Last adjusted gyro value.
◆ last
| struct psmv_parsed_input psmv_device::last |
Last sensor read.
◆ lock
| struct os_mutex psmv_device::lock |
Lock for last and fusion.
◆ state
| struct { ... } psmv_device::state |
What is currently set on the device.
◆ wants
| struct { ... } psmv_device::wants |
What should be set.
The documentation for this struct was generated from the following file:
- drivers/psmv/psmv_driver.c
