Calibration code. More...
#include "util/u_sink.h"#include "util/u_misc.h"#include "util/u_debug.h"#include "util/u_frame.h"#include "util/u_format.h"#include "tracking/t_tracking.h"#include "tracking/t_calibration_opencv.hpp"#include <opencv2/opencv.hpp>#include <sys/stat.h>
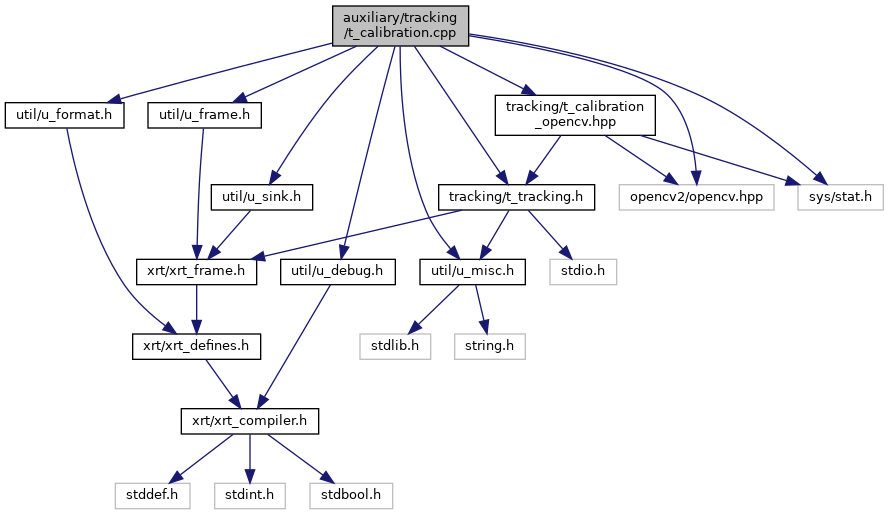
Include dependency graph for t_calibration.cpp:
Data Structures | |
| struct | ViewState |
| Current state for each view, one view for mono cameras, two for stereo. More... | |
| class | Calibration |
| Main class for doing calibration. More... | |
Macros | |
| #define | P(...) snprintf(c.text, sizeof(c.text), __VA_ARGS__) |
Typedefs | |
| typedef std::vector< cv::Point3f > | ModelF32 |
| Model of the thing we are measuring to calibrate, 32 bit. More... | |
| typedef std::vector< cv::Point3d > | ModelF64 |
| Model of the thing we are measuring to calibrate, 64 bit. More... | |
| typedef std::vector< cv::Point2f > | MeasurementF32 |
| A measurement of the model as viewed on the camera. More... | |
| typedef std::vector< cv::Point2d > | MeasurementF64 |
| In doubles, because OpenCV can't agree on a single type to use. More... | |
| typedef std::vector< ModelF32 > | ArrayOfModelF32s |
| For each MeasurementF32 we take we also save the ModelF32. More... | |
| typedef std::vector< ModelF64 > | ArrayOfModelF64s |
| For each MeasurementF64 we take we also save the ModelF64. More... | |
| typedef std::vector< MeasurementF32 > | ArrayOfMeasurementF32s |
| A array of MeasurementF32. More... | |
| typedef std::vector< MeasurementF64 > | ArrayOfMeasurementF64s |
| A array of MeasurementF64. More... | |
| typedef std::vector< cv::Rect > | ArrayOfRects |
| A array of bounding rects. More... | |
Functions | |
| void | t_calibration_frame (struct xrt_frame_sink *xsink, struct xrt_frame *xf) |
| int | t_calibration_stereo_create (struct xrt_frame_context *xfctx, const struct t_calibration_params *params, struct t_calibration_status *status, struct xrt_frame_sink *gui, struct xrt_frame_sink **out_sink) |
| Create the camera calibration frame sink. More... | |
Detailed Description
Calibration code.
Typedef Documentation
◆ ArrayOfMeasurementF32s
| typedef std::vector<MeasurementF32> ArrayOfMeasurementF32s |
A array of MeasurementF32.
◆ ArrayOfMeasurementF64s
| typedef std::vector<MeasurementF64> ArrayOfMeasurementF64s |
A array of MeasurementF64.
◆ ArrayOfModelF32s
| typedef std::vector<ModelF32> ArrayOfModelF32s |
For each MeasurementF32 we take we also save the ModelF32.
◆ ArrayOfModelF64s
| typedef std::vector<ModelF64> ArrayOfModelF64s |
For each MeasurementF64 we take we also save the ModelF64.
◆ ArrayOfRects
| typedef std::vector<cv::Rect> ArrayOfRects |
A array of bounding rects.
◆ MeasurementF32
| typedef std::vector<cv::Point2f> MeasurementF32 |
A measurement of the model as viewed on the camera.
◆ MeasurementF64
| typedef std::vector<cv::Point2d> MeasurementF64 |
In doubles, because OpenCV can't agree on a single type to use.
◆ ModelF32
| typedef std::vector<cv::Point3f> ModelF32 |
Model of the thing we are measuring to calibrate, 32 bit.
◆ ModelF64
| typedef std::vector<cv::Point3d> ModelF64 |
Model of the thing we are measuring to calibrate, 64 bit.
Function Documentation
◆ t_calibration_stereo_create()
| int t_calibration_stereo_create | ( | struct xrt_frame_context * | xfctx, |
| const struct t_calibration_params * | params, | ||
| struct t_calibration_status * | status, | ||
| struct xrt_frame_sink * | gui, | ||
| struct xrt_frame_sink ** | out_sink | ||
| ) |
Create the camera calibration frame sink.
- Parameters
-
xfctx Context for frame transport. params Parameters to use during calibration. Values copied, pointer not retained. status Optional pointer to structure for status information. Pointer retained, and pointed-to struct modified. gui Frame sink out_sink Output: created frame sink.
References xrt_frame_sink::push_frame.
